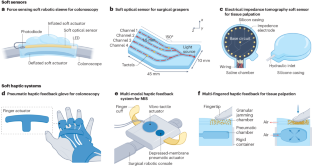
Soft sensing and haptics for medical procedures
Minimally invasive surgery (MIS) lacks sufficient haptic feedback to the surgeon due to the length and flexibility of surgical tools. This haptic disconnect is exacerbated in robotic-MIS, which utilizes tele-operation to control surgical tools. Tactile sensation in MIS and robotic-MIS can be restored in a safe and conformable manner through soft sensors and soft haptic feedback devices.
This is a preview of subscription content, access via your institution
Access options
Access Nature and 54 other Nature Portfolio journals
Get Nature+, our best-value online-access subscription
cancel any time
Subscribe to this journal
Receive 12 digital issues and online access to articles
133,45 € per year
only 11,12 € per issue
Buy this article
- Purchase on SpringerLink
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout
References
- Othman, W. et al. Tactile sensing for minimally invasive surgery: conventional methods and potential emerging tactile technologies. Front. Robot. AI8, 705662 (2022). ArticlePubMedPubMed CentralGoogle Scholar
- Runciman, M., Darzi, A. & Mylonas, G. P. Soft robotics in minimally invasive surgery. Soft Robot.6, 423–443 (2019). ArticlePubMedPubMed CentralGoogle Scholar
- McCandless, M., Gerald, A., Carroll, A., Aihara, H. & Russo, S. A soft robotic sleeve for safer colonoscopy procedures. IEEE Robot. Autom. Lett.6, 5292–5299 (2021). ArticlePubMedPubMed CentralGoogle Scholar
- Li, Y. et al. Optical-waveguide based tactile sensing for surgical instruments of minimally invasive surgery. Front. Robot. AI8, 773166 (2022). ArticlePubMedPubMed CentralGoogle Scholar
- Avery, J., Shulakova, D., Runciman, M., Mylonas, G. P. & Darzi, A. Tactile sensor for minimally invasive surgery using electrical impedance tomography. IEEE Trans. Med. Robot. Bionics2, 561–564 (2020). ArticleGoogle Scholar
- Gerald, A. et al. A soft robotic haptic feedback glove for colonoscopy procedures. In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 583–590 (IEEE, 2022).
- Abiri, A. et al. Multi-modal haptic feedback for grip force reduction in robotic surgery. Sci. Rep.9, 5016 (2019). ArticleADSPubMedPubMed CentralGoogle Scholar
- Li, M. et al. Multi-fingered haptic palpation utilizing granular jamming stiffness feedback actuators. Smart Mater. Struct.23, 095007 (2014). ArticleADSGoogle Scholar
- Chen, S., Chen, Y., Yang, J., Han, T. & Yao, S. Skin-integrated stretchable actuators toward skin-compatible haptic feedback and closed-loop human-machine interactions. npj Flex. Electron.7, 1 (2023). ArticleGoogle Scholar
- Aydin, M. et al. Novel soft haptic biofeedback — pilot study on postural balance and proprioception. Sensors22, 3779 (2022). ArticleADSPubMedPubMed CentralGoogle Scholar
Author information
Authors and Affiliations
- Department of Mechanical Engineering, Boston University, Boston, MA, USA Arincheyan Gerald & Sheila Russo
- Division of Materials Science & Engineering, Boston University, Boston, MA, USA Sheila Russo
- Arincheyan Gerald
